文献分享:器件小组
Nature, 2020,583,237
Nature:可移动的机器人化学家
A mobile robotic chemist
Benjamin Burger, Phillip M. Maffettone, Vladimir V. Gusev, Catherine M. Aitchison, Yang Bai, Xiaoyan Wang, Xiaobo Li, Ben M. Alston, Buyi Li, Rob Clowes, Nicola Rankin, Brandon Harris, Reiner Sebastian Sprick & Andrew I. Cooper
前言
你是否为每天无尽的实验而苦恼?是否为筛选最佳的实验变量而疑惑?是否期望新的实验室伙伴帮助你完成实验?“机器人化学家”或许是解决方案之一。
近些年来,随着自动化技术和机械技术等工程领域技术的发展,“机器人化学家”的想法被科学家所追寻。2015年,美国默克制药公司的化学家设计了一种可以实现C-C等偶联反应的平行偶联反应平台(1);2018年,美国瑞辉公司的化学家设计了一种自动对Suzuki-Miyaura偶联反应的化学反应条件和底物进行高通量筛选的平台(2);2019年,美国麻省理工学院的Klavs F. Jensen教授等人设计了一个由机器人控制的利用人工智能来设计合成路线的化学合成实验平台(3)。
但是,此类的高通量化学合成平台通常仅仅能够完成单个特定的实验任务,不能像研究员一样在实验室自由地行动,完成各种实验。能不能让“机器人化学家”突破这种局限?英国利物浦大学Andrew I. Cooper教授研究组近期的研究成果给出了答案。
内容
近期,英国利物浦大学Andrew I. Cooper教授等人设计了一台会移动的机械臂式的机器人来帮助他们进行光催化水解实验的探索,推动了“机器人化学家”的发展。
1.机器人的设计和实验室的改造
作者设计了借助激光扫描和触觉反馈实现精确定位的可移动机器人(图1a),该机器人由一个机械手臂和一个可以移动的平台构成,主体部分均由库卡(KUKA)机器人有限公司1制作。机器人高约1.75米,重约430千克,在最佳条件下每天可以工作21.6小时(其余时间充电)。此外,作者给机器人配备了一个多用途的夹具,使其可以像实验员一样在实验室内自由移动,并独立完成实验室中的各项操作,包括固液药品称取和使用、分液、给气相色谱站送样(图1c)和储存样品(图1d)。同时,作者对实验室进行改造,建立了八个不同的工作站满足了实验所需的六个流程(图1b)。
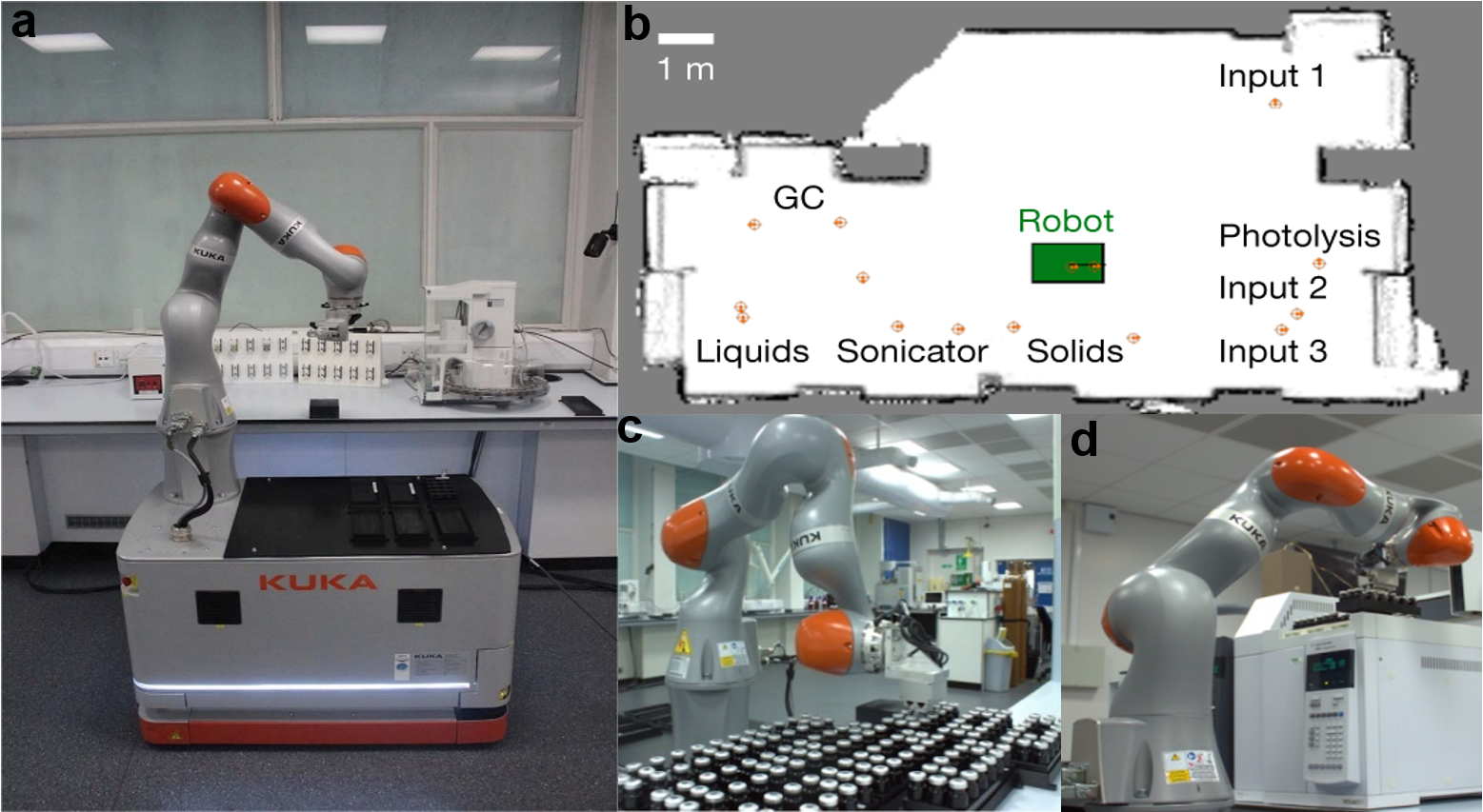
图1: 可移动的机器人和实验站。a:机器人外观。b:由激光扫描生成的实验室地图,显示八个工作站的位置;橙色准星指示记录的导航位置,绿色矩形指示机器人的位置。输入1,2,3分别是存放已完成样品的区域,空瓶的区域和气相色谱站。c:气相色谱分析后,机器人把已完成样品放在输入站1。d:机器人给气相色谱站装上一个新的样品架以便进行实验。
2. 光催化水解实验
实验目标:
对于许多光催化剂,需要牺牲性质的空穴清除剂来从水中产生氢,例如三乙胺(TEA)或三乙醇胺(TEOA),而这些空穴清除剂在反应中会不可逆地分解。同时,光催化水解也会受到不同实验因素的干扰,例如溶液pH值等。为此作者希望找到一种效率与TEOA相当、不会不可逆降解的生物来源的空穴清除剂,并探索出该空穴清除剂最佳的光催化水解条件。
2.1 空穴清除剂的筛选
首先,作者选用了光催化剂P10,这是一种在三乙醇胺(TEOA)存在下具有良好析氢反应光催化活性的共轭聚合物。作者使用机器人从30个候选化合物中筛选新型的空穴清除剂。这一筛选过程没有用到任何AI,机器人像实验员一样称样品、配溶液、开反应和测产物(图1d)。各个候选空穴清除剂的析氢率结果(图2a)表明:L-半胱氨酸的产氢率(HER)为1201 µmol g-1h-1,并且通过核磁共振氢谱发现其反应前后无变化(图2b),表明具有可逆氧化还原的潜力。
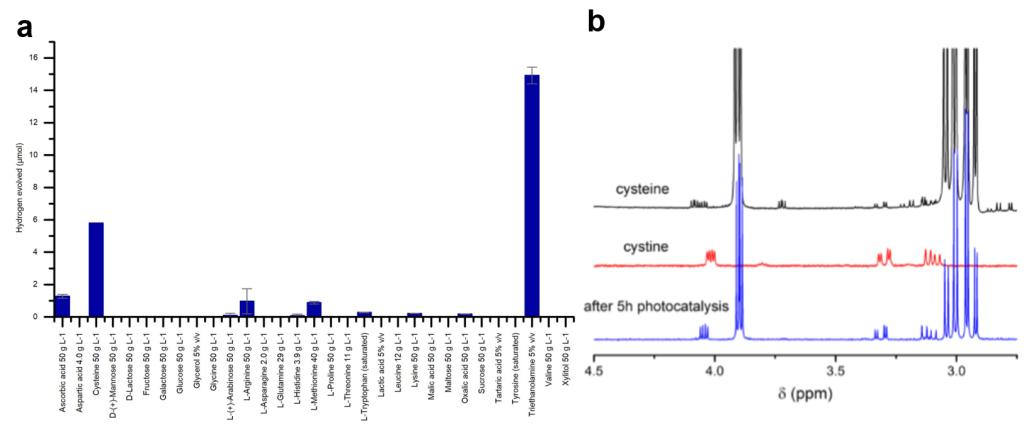
图2a:候选生物衍生牺牲空穴清除剂的析氢率。b:反应前后L-半胱氨酸的核磁氢谱
2.2 光催化水解实验条件的探索
L-半胱氨酸尽管具有空穴清除剂的潜力,但是其产氢效率远低于同浓度下的TEOA。于是,作者希望从五个方向来提升P10/L-半胱氨酸的催化效率:染料敏化(三种染料:亚甲基蓝、酸性红87、罗丹明B)、pH(NaOH)、离子强度(NaCl)、表面活性剂(十二烷基硫酸钠SDS、聚乙烯吡咯烷酮PVP)、氢键作用(二硅酸钠)(图3a)。包括P10和L-半胱氨酸,一共有10个变量需要讨论,而对于这个10个变量的特定搜索空间,有超过9800万个点需要讨论(图3b)。为了减少实验次数同时完成必要的10个变量的分析比对,作者基于高斯过程回归和并行的搜索策略,开发了一种算法来执行贝叶斯优化,将实验所需总次数压缩至688次。机器人在8天内进行的688次实验的结果如图4a所示。图4a中黑色方块为仅P10和L-半胱氨酸时实验的析氢速率基线:为3.36±0.30 µmol h-1,以此来检查实验稳定性。
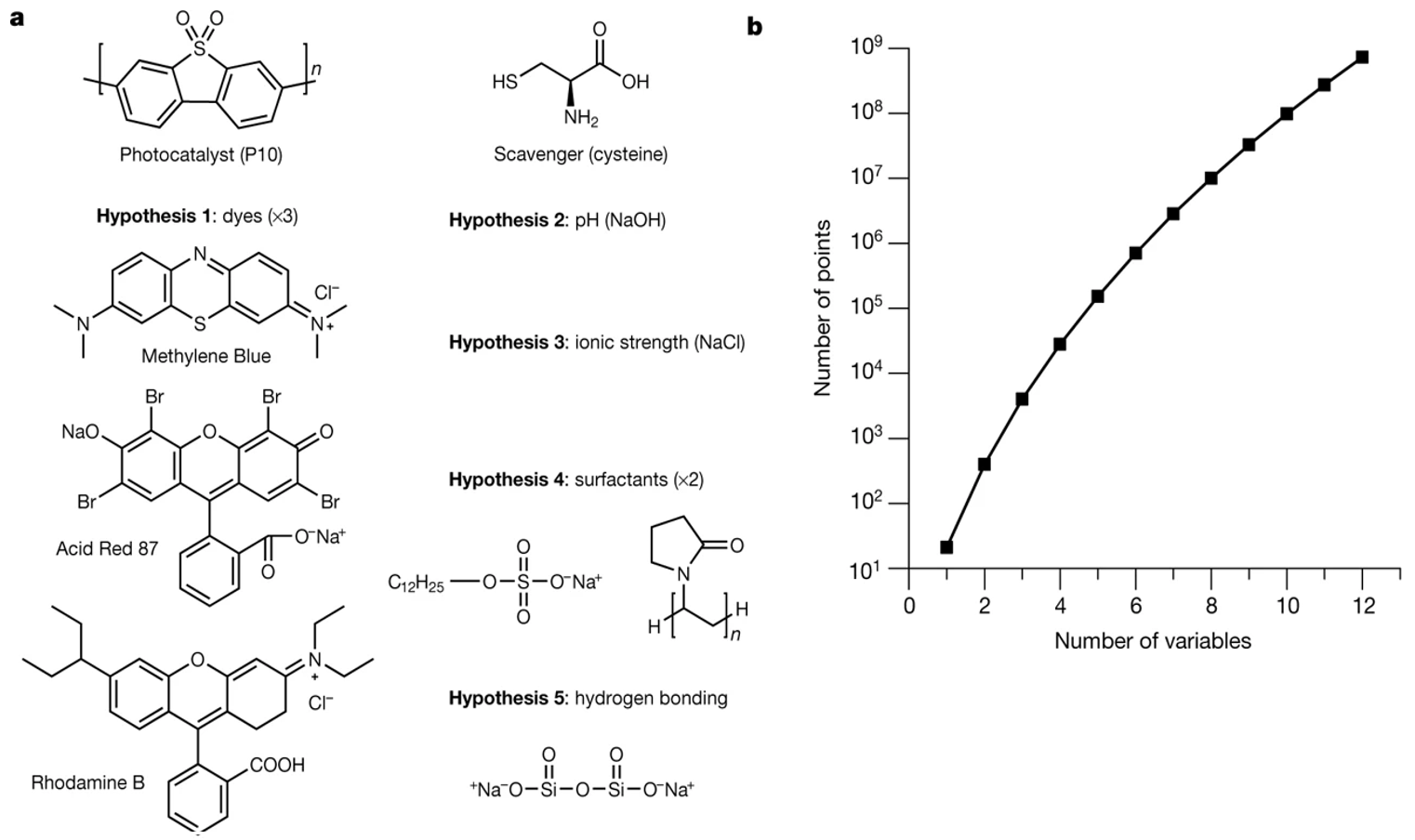
图3:虚拟主导的自主搜索策略。a:机器人根据五种不同的假设搜索化学空间以优化光催化剂+清除剂组合的活性。它同时改变这10种化学物质的浓度。b:图中显示了单个曲面或搜索空间的大小,对于这个十个变量的问题,完整的测试点有98,423,325个。
最初,机器人从随机条件开始,发现多组分催化剂配方,其活性大多低于仅有P10和L-半胱氨酸的实验情况。然后,机器人发现添加氯化钠对产氢率的改善很小,从而验证了离子强度不是很重要。在进一步的实验中,机器人发现三种染料或两种表面活性剂均不能提高产氢率,于是这五个变量被取消选择(图4b);最后机器人了解到添加二硅酸钠和NaOH可以提高产氢率。经过688次实验后,机器人发现最佳的催化剂配方是NaOH(6 mg),L-半胱氨酸(200 mg),二硅酸钠(7.5 mg)、P10(5 mg)和水(5 ml)的混合物,产氢率为21.05 µmol h-1,是开始条件下产氢率的六倍。
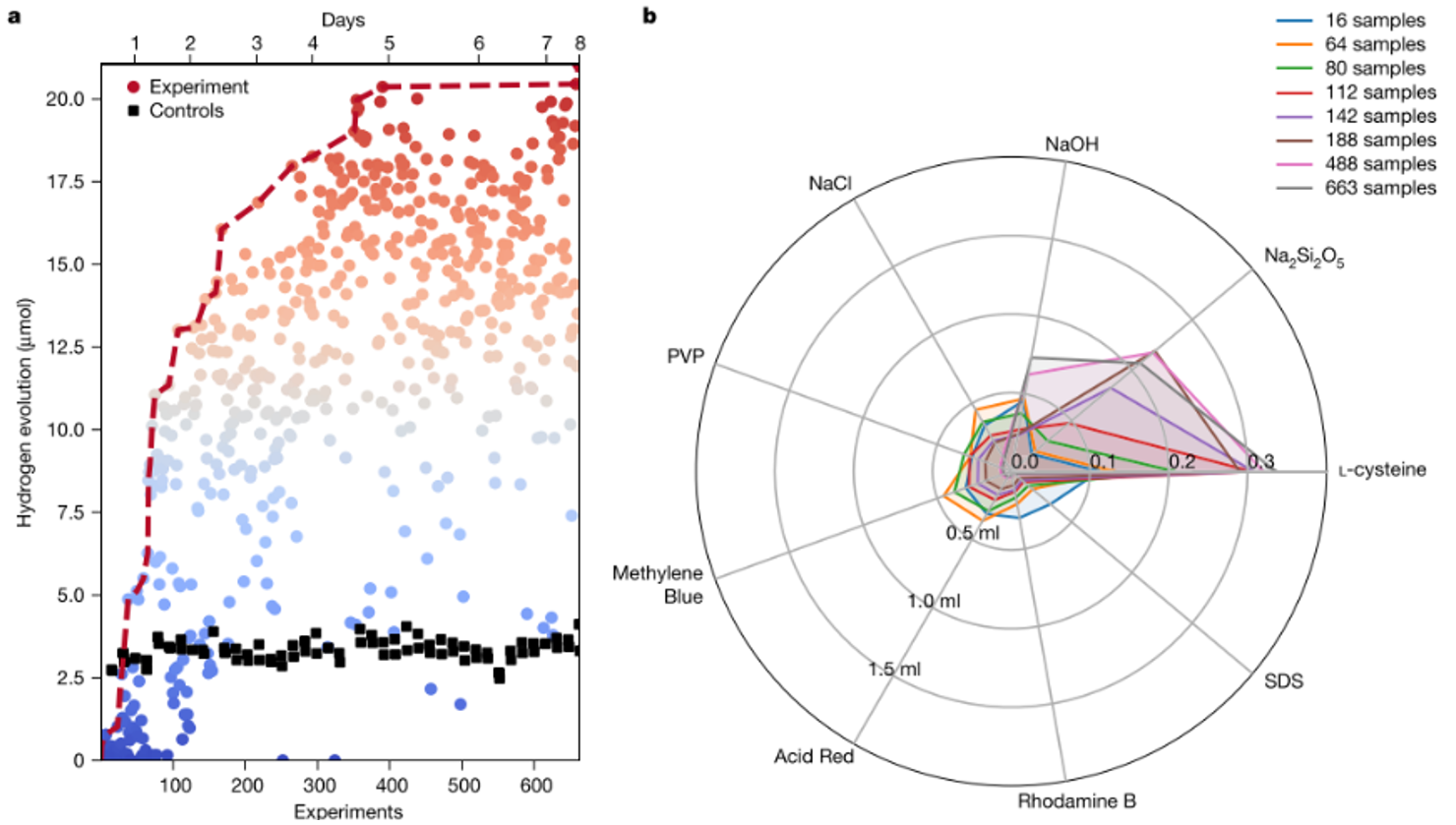
图4a:该图显示了在8天的自主搜索中每个实验的氢气释放量(共计688次实验)。b:以毫升为单位显示搜索空间平均采样演化的雷达图;刻度表示所分配的最大溶液的体积分数。
局限性
目前该方法也有一定局限性。例如:由于假定所有变量都具有相同的初始重要性,所以贝叶斯优化具有一定盲目性。此外,这种机器人搜索不会捕获现有的化学知识,也不会包括理论或物理模型,也就没有计算大脑。同样,这个系统目前还不能自行产生和检验科学假设。
总结
“机器人化学家”能够以实验室为家,连续高效的进行化学实验研究;更能从多维度的条件变量和大数据中进行分析和筛选,有望成为未来化学和工程领域发展的重要方向。本文所设计的“机器人化学家”和使用的搜索策略也具有被进一步推广使用的潜力。同时,机器人的使用能够在一定程度上解放研究人员的双手,为他们腾出更多的时间进行创作性思考,促进化学等相关专业的发展。
原文链接:https://www.nature.com/articles/s41586-020-2442-2
参考文献
[1] A. Buitrago Santanilla et al., Nanomole-scale high-throughput chemistry for the synthesis of complex molecules. Science 347, 49-53 (2015).
[2] D. Perera et al., A platform for automated nanomolescale reaction screening and micromole-scale synthesis in flow. Science 359,429-434(2018)
[3] S. Steiner et al., Organic synthesis in a modular robotic system driven by a chemical programming language. Science 363, (2019).
注:
库卡(KUKA)机器人有限公司:公司1898年于德国巴伐利亚州的奥格斯堡成立,是世界领先的工业机器人制造商之一。中国家电企业美的集团于2017年1月顺利收购德国机器人公司库卡的94.55%的股权。
撰稿人:周达海(2018级硕士生)
校稿人:郑珏婷(2018级博士生)
")
