仪器小组文献分享
Nature: 电子集成-批量生产的微型机器人

前言
电子器件微型化以生产细胞大小的机器人一直是科学家们追求的目标,五十年代微电子摩尔定律为微小机器人技术的领域带来了显著的机会,为电、磁和光学系统提供更多的可能性。但由于缺乏合适的微米级致动器系统,微小机器人技术一直受到限制。本工作开发的新型的电化学原理的电压可控致动器使机器人移动的重要部件——致动器研究终于出现重大突破,首次制造出尺寸小于0.1毫米的机器人,并且还能够进行大规模生产,一个 4 英寸的硅片就可以同时制造约 100 万个该大小的机器人。
内容
作者通过开发新型的电压可控电化学致动器克服了一个存在了几十年的障碍-没有可以与半导体处理无缝集成并且同时响应标准电子控制信号的微米级执行器系统,该致动器可在低电压(200微伏)、低功率(10纳瓦)下运行。与此同时作者以亚微米级步行机器人为原型开发了光刻制造。该过程的每个步骤都是并行执行的,这使得每4英寸晶圆就能够生产超过一百万个机器人,这些步骤都可以进行大规模生产,这样在基于硅的功能性机器人领域也迈出的重要一步。
图1a展示了仍附着在其衬底上的显微机械手,它由两部分组成:带有内部电子元件的主体和可致动的腿。图1b展示了释放后的机械手的侧视图。每个机器人都由两个主要部分组成:一个装有标准硅电子器件的主体,以及一个由作者团队新开发的执行器和面板组成的支腿,它们设定了支腿的三维形状。在这种情况下,电子设备是由硅光伏电池和金属互连制成的简单电路。这些显微机器人在被一系列激光脉冲照亮时会行走,如图1c所示,而实际显微照片序列则如图1d所示,微机器人在物体表面上行走,每帧间隔约8 s。每个机器人的大小都可与较大的微生物相媲美;图1e显示了一个靠近单细胞草履虫的机器人。作为同一集成过程的一部分,所有组件都是并行制造的。
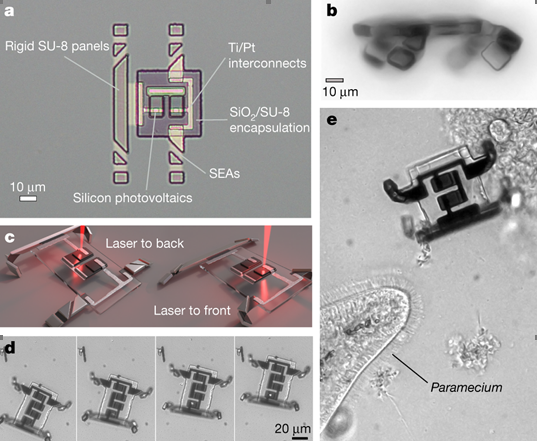
图1:微型机器人的构造与行为
在致动方法上作者将重点放在氧物种吸附方式中的致动上,因为其曲率变化大于氢吸附的曲率变化,这些曲率的变化转换成可输出的电压信号,在较低的电压下也能进行信号传输,并且行为可高度重现。在这种情况下,执行器在大约200 mV的阈值内可逆地从平面变到卷曲。它们消耗的功率不到10 nW,这是由执行器和电解液之间的法拉第电流决定的。
驱动器驱动了机器人的腿,它可以将电能转换为动能。当该装置获得极少量的电流时,它就会折叠和展开。电流可使周围溶液中的离子吸附到驱动器表面,改变机器人腿上力的方向,从而使腿弯曲。然后,研究人员将这些机器人腿部与中央底盘上的几块太阳能电池相连。当研究人员使用激光照射这些太阳能电池时,微型机器人的腿就可以弯曲和伸直。当使用激光在机器人前腿和后腿交替照射时,就可以推动机器人移动。激光用于控制驱动。由于它们是由高度稳定的材料制成的,所以很坚固,能在高酸性环境和超过 200 K 的温度变化中生存下来。启用这些微型机器人的关键创新是新型执行器,文中称其为表面电化学执行器或SEA(图2)。SEA由纳米级的铂制成,并使用标准半导体技术制造。
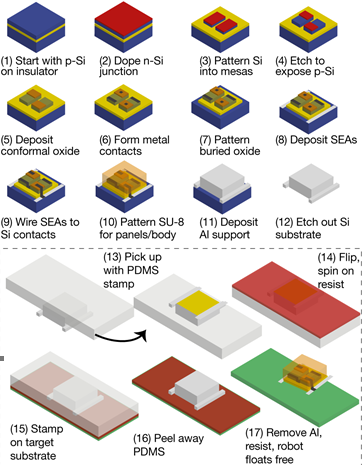
图2:响应于电化学驱动的吸附的SEA弯曲的示意图
作者为了演示SEA,制造了一个原型微机器人,该机器人在接收到一系列激光脉冲时会行走,如图所示。从P型绝缘体上硅晶圆开始,然后使用标准掺杂、光刻和金属化(图3)创建机器人的机载电路。硅加工完成后,沉积并给腿部进行美化,首先构建SEA,然后构建刚性面板。支腿的过程是有滞后效应的:仅在制造完所有电子元件之后才制造致动器和面板。通过保持较低的工艺温度(小于250℃),这些步骤不会损害先前制造的电子产品,并且与将来可容纳更复杂的互补金属氧化物半导体过程完全兼容。
图3:原型微机器人制造过程示意图。
结论与展望
微型机器人能够被移液器和注射器安全吸入,并像化学物质一样通过皮下针头注射,由于它们体型微小,因而可以通过最小型号的皮下注射针头,并且在注射后也可维持机械功能,这样一个微型机器人为探索生物内环境带来了可能。研究人员还将这个微型机器人称为“牵线木偶”,因为操作员可以通过激光照射机器人底盘上的太阳能电池来提供指令。而它主要的缺点也在于,这些机器人必须始终与它们的能量和信号源“拴在一起”。所以,目前这些微型机器人功能仍有限,它们不能自动行走,移动速度比大多数游泳机器人慢,且不能感知环境,缺乏磁引导微型机器人的控制。
原文链接:https://www.nature.com/articles/s41586-020-2626-9
攥稿人:王海川(2018级硕士研究生)
校稿人:张承扬(2018级硕士研究生)
")
